| Japanese | English |
15th LSI Design Contests・in Okinawa Design Specification - 4-1-1
4-1-1. N=4 の場合のFFT回路設計
(1) 回路設計
Radix-2アルゴリズムにより、1) N=4 のFFT演算の概念図は図3のようになる。
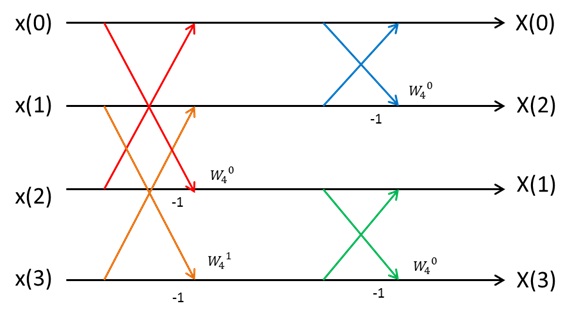
図3: 4点FFTの概念図
図3の概念図に従い、 N=4 のFFT回路は4個のバタフライ演算回路で実現できる。
概念的ブロック図を図4に示す。
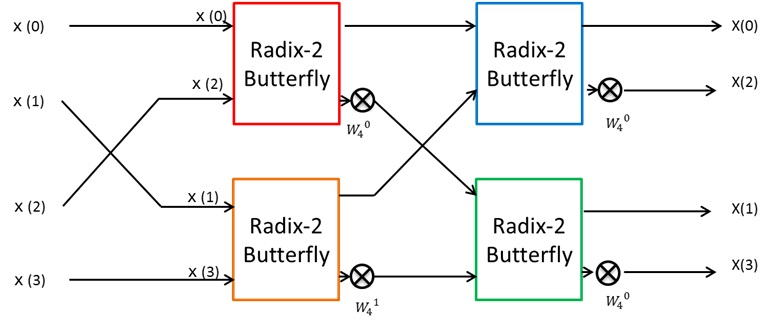
図4: 4点FFTの概念的ブロック図
図3の赤線により表されたバタフライ演算を図4の赤枠で表されたバタフライ演算回路へと変換する。 他の演算も同様である。
設計した回路を図5に示す。
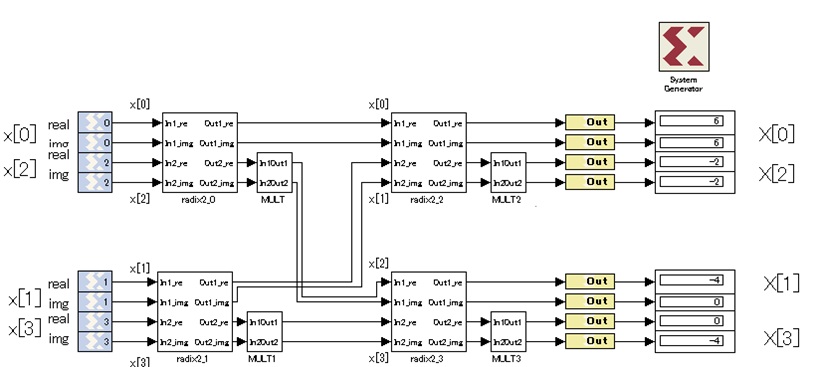
図5: パラレル入力に対する4点FFT回路
各サブシステムの内部を以下に示す。
a)radix2
ここではradix2_0から3までの演算回路を示す。 2つの複素数を入力し、2つの複素数を出力する回路であるため、実数と虚数を分けて入力し、実数は実数同士、 虚数は虚数同士で加減算を行う回路である。構成は図4に示す。
図3のサブシステムradix-2_1、 radix-2_2、radix-2_3はradix2_0と同一の構成であるため省略する。
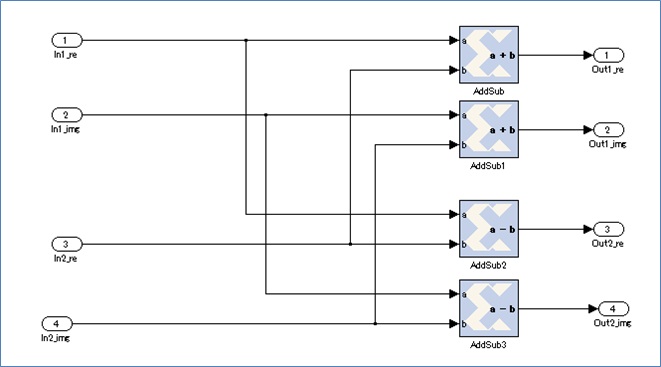
図6: サブシステムradix-2_0のモデル
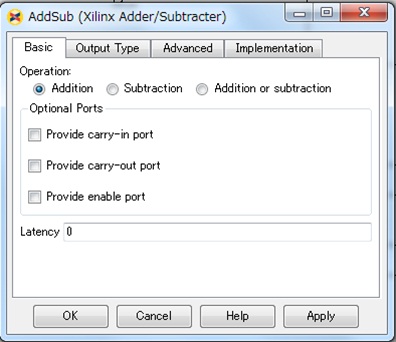
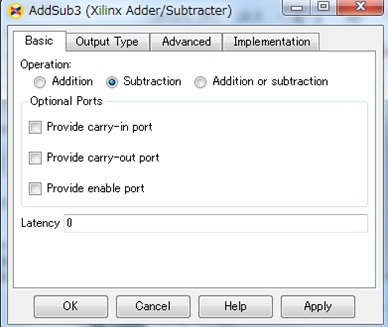
図7: AddSubのパラメータ 図8: AddSub2のパラメータ
図6のAddSub1はAddSubと同一の構成であるため省略する。
同様にAddSub3はAddSub2と同一の構成であるため省略する。
b) MULT
ここではMULT0から3までの演算回路を示す。
MULTは回転因子乗算回路である。
複素数 ![]() 、
、 ![]() の乗算は、
の乗算は、  と記述できる。
と記述できる。
この過程に従って実数と虚数の2つの入力に対し、回転因子の実数と虚数を乗算する。 図5のサブシステムMULTのモデルを図9に示す。 図5のサブシステムMULT、MULT1、MULT2、MULT3のモデルはconstantブロックのパラメータ以外同一の構成のため、省略する。
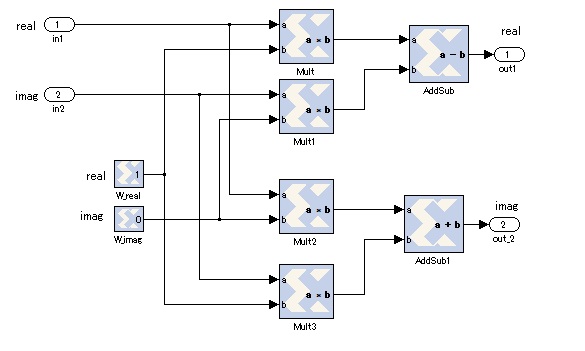
図9: サブシステムMULTのモデル
図9のAddSubは図6のAddSub2と同一の構成であるため省略する。
同様に図9のAddSub3は図6のAddSubと同一の構成であるため省略する。
図9のMULTのパラメータを図10に示す。
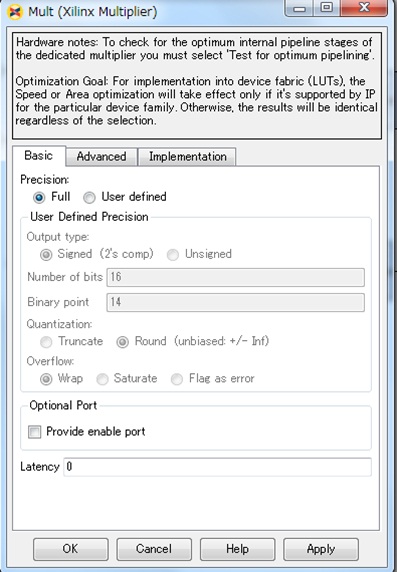
図10: Multのパラメータ
図9のMult1、Mult2、Mult3はMultと同一の構成であるため省略する。
このとき回転因子は![]() 、
、
![]() であるため、MULT、MULT1、MULT2、MULT3内の回転因子を表すconstantブロックのパラメータは表1のようになる。
であるため、MULT、MULT1、MULT2、MULT3内の回転因子を表すconstantブロックのパラメータは表1のようになる。
表1: 回転因子のパラメータ
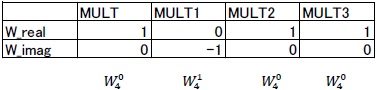
サブシステムMULTは、複素数の入力信号に対して、複素数の回転因子を乗算し、出力する回路である。
(2) 検証
図5の回路に表2に示す値を入力して計算を行うと表2の X[0]〜X[3] を得た。
MATLABにおける演算結果(図11参照)と一致していることが確認できる。
表2: MATLABにおける演算結果との誤差
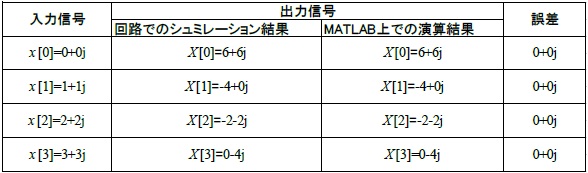

図11: MATLABにおけるFFT演算結果
また、この回路の入力と出力をScopeを用いて確認すると、図12、13のようになる。
これからパラレル入力の場合のFFTのLatencyは 0 であることが確認できる。
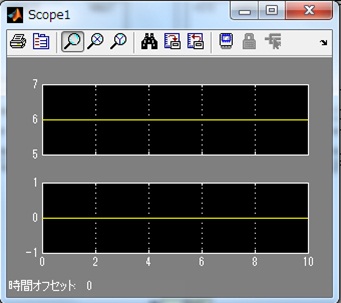
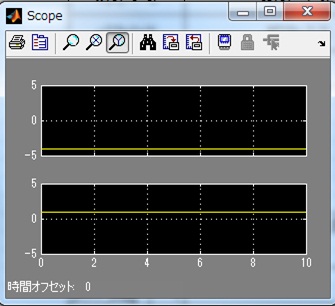
図12: 出力 X[0]_real と入力 x[0]_real 図13: 出力 X[1]_real と入力x[1]